「データ駆動型制御」のご紹介
ワンショットの実験データからコントローラのパラメータを適合
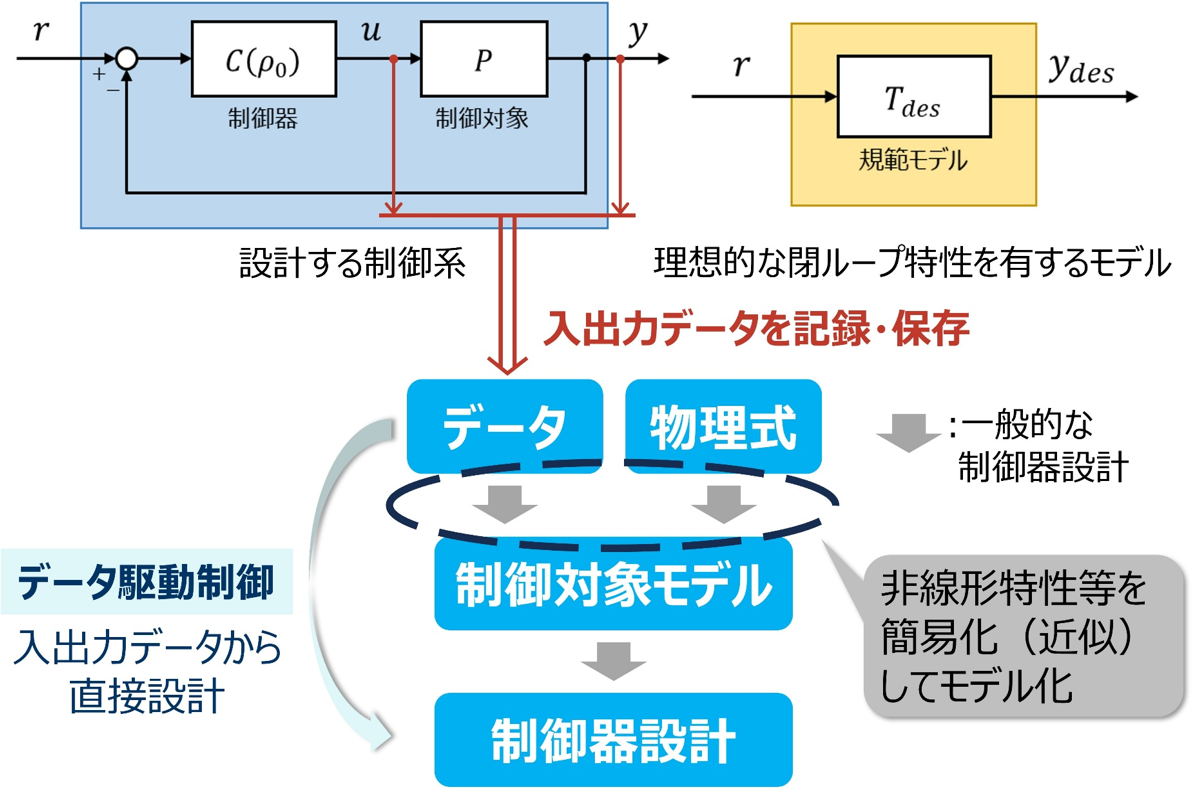
データ駆動制御では制御対象モデルの構築を省いて入出力データから直接、制御器を設計します。
実験データの他、3Dモデルのシミュレーションデータからも直接コントローラのパラメータの適合が可能です。
カタログをご用意しております。
ページ下部のフォームにご回答後、ダウンロードリンクを記載したメールをお送りいたしますので、ぜひご活用ください。
実験データの他、3Dモデルのシミュレーションデータからも直接コントローラのパラメータの適合が可能です。
カタログをご用意しております。
ページ下部のフォームにご回答後、ダウンロードリンクを記載したメールをお送りいたしますので、ぜひご活用ください。
概要
モデルベース開発による制御系設計では、物理式に基づくモデリングやシステム同定等から制御対象モデルを構築し、その後、制御対象モデルに基づき制御器を設計します。
データ駆動制御では制御対象モデルの構築を省いて入出力データから直接、制御器を設計します。
特にVRFT(Virtual Reference Feedback Tuning)と呼ばれる手法はモデルマッチング問題と最適化手法によりワンショットの実験データからコントローラのパラメータを適合することが可能です。
そのため、モデリングによる近似の影響がなく非線形特性など複雑な動特性を十分に考慮した制御器を設計することが可能です。
データ駆動制御では制御対象モデルの構築を省いて入出力データから直接、制御器を設計します。
特にVRFT(Virtual Reference Feedback Tuning)と呼ばれる手法はモデルマッチング問題と最適化手法によりワンショットの実験データからコントローラのパラメータを適合することが可能です。
そのため、モデリングによる近似の影響がなく非線形特性など複雑な動特性を十分に考慮した制御器を設計することが可能です。
<特長>
- ワンショットの実験データからコントローラのパラメータを適合(ex 量産品の場合,各個体のワンショットの実験データから,機差を考慮したパラメータの適合が可能)
- モデリングによる近似の影響がなく非線形特性など複雑な動特性を十分に考慮した制御器を設計することが可能
- 実験データの他、3Dモデルのシミュレーションデータからも直接コントローラのパラメータの適合が可能
カタログダウンロード・お問合せ
フォーム回答後に、カタログのダウンロードリンクを記載したメールが送信されます。
MATLAB/Simulinkは、The Mathworks, Inc.の登録商標です。
LabVIEWは、National Instruments Corporationの商標です。
その他のブランド名や製品名は、それぞれ各社の商標または登録商標です。